TED日本語
TED Talks(英語 日本語字幕付き動画)
TED日本語 - ラディカ・ナグパール: 魚の群れから学習する知能機械
TED Talks
魚の群れから学習する知能機械
What intelligent machines can learn from a school of fish
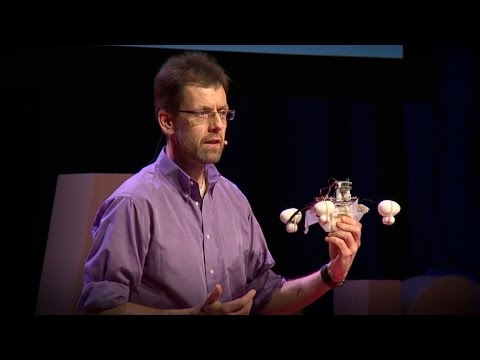
ラディカ・ナグパール
Radhika Nagpal
内容
空想科学小説が描く未来では、人工知能は私たちと同じ筋道で思考をするようになっています。でも、自然界にある他の知性をモデルに人工知能を作り上げたらどうでしょう?ロボット技術者のラディカ・ナグパールは、昆虫や魚の群れが示す集団的知性を研究し、それらの行動規則を理解しようとしています。この先見性のあるトークで、ナグパールは人工的に集団の力を作り出す自らの研究を紹介するとともに、ロボットが群れをなして堤防を作ったり、作物の受粉をしたり、サンゴ礁の監視や衛星の集団形成をしたりする未来を語ります。


字幕
SCRIPT
Script

In my early days as a graduate student, I went on a snorkeling trip off the coast of the Bahamas. I'd actually never swum in the ocean before, so it was a bit terrifying. What I remember the most is, as I put my head in the water and I was trying really hard to breathe through the snorkel, this huge group of striped yellow and black fish came straight at me ... and I just froze. And then, as if it had suddenly changed its mind, came towards me and then swerved to the right and went right around me. It was absolutely mesmerizing. Maybe many of you have had this experience. Of course, there's the color and the beauty of it, but there was also just the sheer oneness of it, as if it wasn't hundreds of fish but a single entity with a single collective mind that was making decisions. When I look back, I think that experience really ended up determining what I've worked on for most of my career.
I'm a computer scientist, and the field that I work in is artificial intelligence. And a key theme in AI is being able to understand intelligence by creating our own computational systems that display intelligence the way we see it in nature. Now, most popular views of AI, of course, come from science fiction and the movies, and I'm personally a big Star Wars fan. But that tends to be a very human-centric view of intelligence. When you think of a fish school, or when I think of a flock of starlings, that feels like a really different kind of intelligence. For starters, any one fish is just so tiny compared to the sheer size of the collective, so it seems that any one individual would have a really limited and myopic view of what's going on, and intelligence isn't really about the individual but somehow a property of the group itself.
Secondly, and the thing that I still find most remarkable, is that we know that there are no leaders supervising this fish school. Instead, this incredible collective mind behavior is emerging purely from the interactions of one fish and another. Somehow, there are these interactions or rules of engagement between neighboring fish that make it all work out.
So the question for AI then becomes, what are those rules of engagement that lead to this kind of intelligence, and of course, can we create our own?
And that's the primary thing that I work on with my team in my lab. We work on it through theory, looking at abstract rule systems and thinking about the mathematics behind it. We also do it through biology, working closely with experimentalists. But mostly, we do it through robotics, where we try to create our own collective systems that can do the kinds of things that we see in nature, or at least try to.
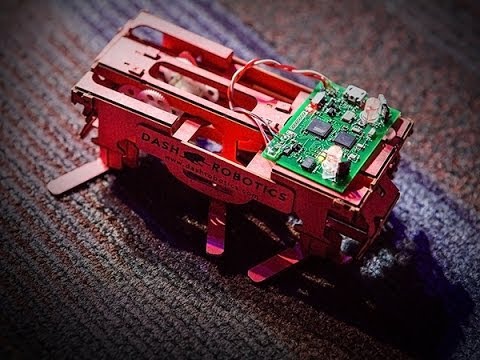
One of our first robotic quests along this line was to create our very own colony of a thousand robots. So very simple robots, but they could be programmed to exhibit collective intelligence, and that's what we were able to do. So this is what a single robot looks like. It's quite small, about the size of a quarter, and you can program how it moves, but it can also wirelessly communicate with other robots, and it can measure distances from them. And so now we can start to program exactly an interaction, a rule of engagement between neighbors. And once we have this system, we can start to program many different kinds of rules of engagement that you would see in nature.
So for example, spontaneous synchronization, how audiences are clapping and suddenly start all clapping together, the fireflies flashing together. We can program rules for pattern formation, how cells in a tissue determine what role they're going to take on and set the patterns of our bodies. We can program rules for migration, and in this way, we're really learning from nature's rules.
But we can also take it a step further. We can actually take these rules that we've learned from nature and combine them and create entirely new collective behaviors of our very own.
So for example, imagine that you had two different kinds of rules. So your first rule is a motion rule where a moving robot can move around other stationary robots. And your second rule is a pattern rule where a robot takes on a color based on its two nearest neighbors. So if I start with a blob of robots in a little pattern seed, it turns out that these two rules are sufficient for the group to be able to self-assemble a simple line pattern. And if I have more complicated pattern rules, and I design error correction rules, we can actually create really, really complicated self assemblies, and here's what that looks like.
So here, you're going to see a thousand robots that are working together to self-assemble the letter K. The K is on its side. And the important thing is that no one is in charge. So any single robot is only talking to a small number of robots nearby it, and it's using its motion rule to move around the half-built structure just looking for a place to fit in based on its pattern rules. And even though no robot is doing anything perfectly, the rules are such that we can get the collective to do its goal robustly together. And the illusion becomes almost so perfect, you know -- you just start to not even notice that they're individual robots at all, and it becomes a single entity, kind of like the school of fish.
So these are robots and rules in two dimensions, but we can also think about robots and rules in three dimensions. So what if we could create robots that could build together? And here, we can take inspiration from social insects. So if you think about mound-building termites or you think about army ants, they create incredible, complex nest structures out of mud and even out of their own bodies. And like the system I showed you before, these insects actually also have pattern rules that help them determine what to build, but the pattern can be made out of other insects, or it could be made out of mud. And we can use that same idea to create rules for robots.
So here, you're going to see some simulated robots. So the simulated robot has a motion rule, which is how it traverses through the structure, looking for a place to fit in, and it has pattern rules where it looks at groups of blocks to decide whether to place a block. And with the right motion rules and the right pattern rules, we can actually get the robots to build whatever we want. And of course, everybody wants their own tower.
(Laughter)
So once we have these rules, we can start to create the robot bodies that go with these rules. So here, you see a robot that can climb over blocks, but it can also lift and move these blocks and it can start to edit the very structure that it's on. But with these rules, this is really only one kind of robot body that you could imagine. You could imagine many different kinds of robot bodies. So if you think about robots that maybe could move sandbags and could help build levees, or we could think of robots that built out of soft materials and worked together to shore up a collapsed building -- so just the same kind of rules in different kinds of bodies. Or if, like my group, you are completely obsessed with army ants, then maybe one day we can make robots that can climb over literally anything including other members of their tribe, and self-assemble things out of their own bodies. Once you understand the rules, just many different kinds of robot visions become possible.
And coming back to the snorkeling trip, we actually understand a great deal about the rules that fish schools use. So if we can invent the bodies to go with that, then maybe there is a future where I and my group will get to snorkel with a fish school of our own creation.
Each of these systems that I showed you brings us closer to having the mathematical and the conceptual tools to create our own versions of collective power, and this can enable many different kinds of future applications, whether you think about robots that build flood barriers or you think about robotic bee colonies that could pollinate crops or underwater schools of robots that monitor coral reefs, or if we reach for the stars and we thinking about programming constellations of satellites. In each of these systems, being able to understand how to design the rules of engagement and being able to create good collective behavior becomes a key to realizing these visions.
So, so far I've talked about rules for insects and for fish and for robots, but what about the rules that apply to our own human collective? And the last thought that I'd like to leave you with is that science is of course itself an incredible manifestation of collective intelligence, but unlike the beautiful fish schools that I study, I feel we still have a much longer evolutionary path to walk. So in addition to working on improving the science of robot collectives, I also work on creating robots and thinking about rules that will improve our own scientific collective. There's this saying that I love: who does science determines what science gets done. Imagine a society where we had rules of engagement where every child grew up believing that they could stand here and be a technologist of the future, or where every adult believed that they had the ability not just to understand but to change how science and technology impacts their everyday lives. What would that society look like? I believe that we can do that. I believe that we can choose our rules, and we engineer not just robots but we can engineer our own human collective, and if we do and when we do, it will be beautiful.
Thank you.
(Applause)
大学院に進んだばかりの頃 バハマ諸島沖に シュノーケリングに行きました それまで海で 泳いだことがなかった私には ちょっと怖かったのですが 一番記憶に残っているのは 頭まで水に沈めて シュノーケルで息をしようと 必死になっているときに 黄色と黒の縞模様の魚が ものすごい大群で 私を目がけて やって来たときのことです 私は凍り付きました でも その大群は 私に向かって来たと思えば まるで気でも変えたかのように すっと右にそれて 私をよけて行ったのです 本当にうっとりする光景でした 皆さんもご経験が おありかもしれません もちろん 魚の群れが鮮やかで 美しいということもありますが 一糸乱れぬ一体感がまた 素晴らしいものでした まるで 何百もの魚が 個々に存在するのではなく ただ1つの存在として 集団で共有される1つの頭で 意思決定しているようでした 振り返ってみれば 私の研究人生の大枠は この経験で決まったのだ と思います
私はコンピューター科学者で 人工知能(AI)を専門としています AI分野における重要テーマに 自然界で見られる知性と同じ働きをする 独自の計算システムを作り出すことで 知性を理解する というものがあります AIと言うと 空想科学小説や映画の世界を 思い浮かべる方が多いでしょう 私も『スター・ウォーズ』が大好きです でも そこで描かれる知性は 得てして人間主体のものです 魚の群れや ムクドリの群れの様子を 思い起こしてみると そこには まったく違う知性が あるように感じられます まず どんな魚でも1匹は 群れ全体からすると ものすごく小さいものなので 1つ1つの個体は 何が起こっているのか把握しようにも 本当に限られた 身のまわりのことしか 分からないはずです ですから そこで働く知性は 個体のものではなく その集団そのものが所有するもの と言えるでしょう
次に 今でも本当に驚嘆すべきことだ と思っているのですが こうした魚の群れには 全体を監督するリーダーのような魚はいません 個々の魚同士が 相互に作用し合うことで 信じられないような 集団の知による行動が生まれるのです どうやら 近くにいる魚との間で こうした相互作用や 行動規則が働くことで この動きができているようです
ですからAIにおいて考えるべきは こういった知性を生み出す 行動規則が何であるのか 私たちがそれを作り出せるのか になります
これが私の研究室で チームを組んでやっている主な研究です 理論的な観点から 抽象的な規則体系を子細に見て その背景にある数学的関係を 見出そうとしています また生物学の観点からも 実験研究者と密接に連携して研究しています でも 主となるのは ロボット工学の立場から 私たち独自の集団的なシステムを 作り上げて 自然界と同じように動かす ― 少なくとも それに近づけることです
その中でも初めの頃に行った ロボットを使った挑戦が ロボット1千台で独自のコロニーを 作り上げることでした とてもシンプルながら 集団的知性を発揮できるように プログラムできるロボットで それには成功しました ロボット単体ではこんな感じで すごく小さく 25セント硬貨くらいです 動きをプログラムできるのですが ほかのロボットと無線で交信したり まわりのロボットとの距離を 測ったりもできます これで 周辺の個体との相互作用 つまり行動規則を 正確にプログラムできるように なったわけです ひとたび こうしたシステムができれば 自然界で見られる 多種多様な行動規則も プログラムできるようになります
例えば 自発的同期と呼ばれる行動です 誰かの拍手をきっかけに 急に皆が一斉に拍手するようになるとか 蛍が一斉に光る といったものです パターン形成にかかる規則も プログラムできます 組織内の細胞がそれぞれ 自らの役割を分かって パターンを形成し 人体を形づくるようにです 移動の規則もプログラムできます こんな風に自然界の規則から どんどん学んでいます
さらにもう一歩先に 進めることもできます 自然から学んだ こうした規則を 組み合わせて 私たち独自の まったく新しい集団行動を 作り出すのです
例えば 2つの規則があるとしましょう 1つは 動作に関する規則で 作動中のロボットは静止しているロボットの 周囲を回れるというものです もう1つはパターンの規則で 隣接する2つのロボットによって 自らの色が決まるというものです パターンが生まれる きっかけを ロボット群に与えておくと この2つの規則だけで その集団は 単純な線形パターンを 自ら形づくれるようになります パターンを決める もっと複雑な規則を作り エラー訂正規則も加えると かなり複雑な自己組織化を させることもできます このようなものです
ここでは1千台のロボットが 一緒になって「K」という文字を 自ら形づくっているところです 横向きのKです 大事なのは 誰かの指示で 動いているわけではないことです 個々のロボットは まわりにいる 少数のロボットと交信しているだけで 完成途上にある形のまわりを 動作規則に従って動き パターンの規則にもとづいて 自分が当てはまる場所を探すのです どのロボットも 完ぺきではありませんが これらの規則のお陰で ロボット全体が一丸となり 確実に目標を達成できます そして 完ぺきと言わんばかりの 錯覚が生まれます ― 個々のロボットが 独立して動いているとは気づかないくらい ロボット全体が 1つの存在 魚の群れのようになるのです
これらのロボットや規則は 2次元でのものでしたが 3次元でロボットや規則を 考えることもできます 自ら何かを建てられるロボットを 作り出せたら どうでしょう? この点では 社会性昆虫が 参考になります アリ塚をつくるシロアリや 軍隊アリは 泥や 時には自らの体まで使って 素晴らしく複雑な構造の巣を 作ります 先ほどお見せしたシステムのように これらの昆虫にも 実は パターンの規則が備わっていて それによって 何を作るか決まっているのです ただ ほかの昆虫や泥でパターンが 作られるというだけです 同じ考え方を使って ロボット用の規則を作ることができます
こちらが ロボットの シミュレーションです このロボットの持つ動作規則は 構造物の全体をたどって俯瞰し 当てはまる場所を探す というものです さらに パターンの規則で ブロックのかたまりを見て 新たなブロックを置くか 決めるようになっています 適切な動作規則とパターンの規則を 与えることで ロボットに 私たちが望むものを 何でも建てさせることができます もちろん 誰だって 自分の「タワー」がほしいですよね
(笑)
こうした規則ができたら その規則に見合ったロボット本体を 作ることができます こちらは ブロックをのぼることのできる ロボットで ブロックを持ち上げたり 動かしたりもでき 自分が身を置く構造そのものにも 手を加えられます この規則に見合う形で 考えられるロボット本体の形は これだけではありません もっといろんなものを 想像できます 砂のうを運んで 土手を作るのを手伝ってくれるロボットも できるかもしれませんし やわらかい素材でロボットを作り 崩壊した建物を支える作業を 一緒にすることもできます まったく同じ規則を 様々なロボット本体に使えるのです あるいは 私たちのように 軍隊アリに魅せられてしまったなら いつか 文字どおり何でも 乗り越えるロボットを作れるかもしれません 仲間の上でもお構いなしにのぼり 自分たちの体を使って 自ら物を組み立てるのです 規則さえ理解してしまえば 多種多様なロボットのあり方が 実現できるのです
さて シュノーケリングの話に戻りますと 私たちは 魚の群れが用いる規則の かなりの部分を理解しました それに見合ったロボット本体を発明すれば もしかすると将来的には 私たちは 自ら作った魚の群れと シュノーケリングを楽しめるかもしれません
これまでご紹介した システムの開発を通じて 私たちは 数学的、概念的なツールを活用して 私たち独自の集団の力を 生み出すのに一歩近づいており これは将来 様々なことに応用できます 洪水を防ぐ堤防を作るロボットであるとか 作物の受粉をしてくれる ハチ型ロボットのコロニーとか サンゴ礁の監視をする 水中ロボットの群れとか そして ちょっと背伸びをして 衛星集団を プログラムすることも考えています どのシステムにおいても 行動規則の設計の仕方を理解して 良い集団行動を生み出すことが こうした構想を実現する 鍵となります
さて これまで昆虫や魚や ロボットに関わる規則について お話ししてきましたが 私たち 人間の集団に 当てはまる規則はどうでしょうか? 最後に皆さんにお伝えしたいのは 科学というものは それ自体が 素晴らしい集団的知性を 体現するものですが 私の研究対象である 美しい魚の群れとは違い 私たちの進化は もっともっと長く続くと思うのです ですから ロボットの集団にかかる 科学の発展に取り組むだけでなく ロボットや規則を作ることを通じて 科学に関わる共同体として 私たち自身を高めていけるよう 努めています 私の大好きな名言があります 「どんな人が科学をするかによって 科学でできることが決まる」 こんな行動規則がある社会を 想像してみてください 子どもたち皆が いつかここに立って 未来の科学技術者になれると 信じて育ち 大人もまた 科学技術と 日々の生活との関わりを 理解するだけでなく それを変えられると信じる社会です そんな社会になったら どうでしょう? 私たちにはできる と信じています 自らの規則を選び ロボットだけではなく 私たち人間集団を 動かしていけると信じています もし それが叶ったときには それは素晴らしいものになるでしょう
ありがとうございました
(拍手)
品詞分類
- 主語
- 動詞
- 助動詞
- 準動詞
- 関係詞等
TED 日本語
TED Talks
関連動画

しなやかで柔軟性を持つロボットの驚くべき可能性 - TED Talkジアーダ・ゲルボーニ
2018.07.05ロボットの気持ちを考える ― 人間とロボットの共存社会を目指してレイラ・タカヤマ
2018.02.16ロボットは大学入試に合格できるか?新井紀子
おすすめ 12017.09.13走って飛び跳ねて、ドアも開けられるロボット犬「スポット」マーク・レイバート
2017.08.14汚染物資を「食べる」ロボットジョナサン・ロシター
2017.03.15魅惑的な未来の飛行ロボットを披露ラファエロ・ダンドリーア
2016.03.11イモリの様に走り、泳ぐことのできるロボットアウケ・エイスペールト
2016.02.18空飛ぶロボットの未来ヴィージェイ・クーマー
2015.11.04米粒のサイズのロボットを作る理由サラ・バーグブライター
2015.01.21空飛ぶカメラ、ただしリード付きセルゲイ・ルパシン
2014.10.28自然界で最も不快な生き物にヒントを得たロボットロバート・フル
2014.06.06「心」を宿したロボットガイ・ホフマン
2014.01.17私の水中探査ロボットデイビッド・ラング
2013.12.05なぜ、私たちはロボットに頼ることになるのかロドニー・ブルックス
2013.06.28クアッドコプターの驚くべき運動能力ラファエロ・ダンドリーア
2013.06.11あなたの携帯をパーソナル・ロボットに変える発明ケラー・リナウド
2013.04.09














洋楽 おすすめ
RECOMMENDS
洋楽歌詞
ダイナマイトビーティーエス
洋楽最新ヒット2020.08.20ディス・イズ・ミーグレイテスト・ショーマン・キャスト
洋楽人気動画2018.01.11グッド・ライフGイージー、ケラーニ
洋楽人気動画2017.01.27ホワット・ドゥ・ユー・ミーン?ジャスティン・ビーバー
洋楽人気動画2015.08.28ファイト・ソングレイチェル・プラッテン
洋楽人気動画2015.05.19ラヴ・ミー・ライク・ユー・ドゥエリー・ゴールディング
洋楽人気動画2015.01.22アップタウン・ファンクブルーノ・マーズ、マーク・ロンソン
洋楽人気動画2014.11.20ブレイク・フリーアリアナ・グランデ
洋楽人気動画2014.08.12ハッピーファレル・ウィリアムス
ポップス2014.01.08カウンティング・スターズワンリパブリック
ロック2013.05.31ア・サウザンド・イヤーズクリスティーナ・ペリー
洋楽人気動画2011.10.26ユー・レイズ・ミー・アップケルティック・ウーマン
洋楽人気動画2008.05.30ルーズ・ユアセルフエミネム
洋楽人気動画2008.02.21ドント・ノー・ホワイノラ・ジョーンズ
洋楽人気動画2008.02.15オンリー・タイムエンヤ
洋楽人気動画2007.10.03ミス・ア・シングエアロスミス
ロック2007.08.18タイム・トゥ・セイ・グッバイサラ・ブライトマン
洋楽人気動画2007.06.08シェイプ・オブ・マイ・ハートスティング
洋楽人気動画2007.03.18ウィ・アー・ザ・ワールド(U.S.A. フォー・アフリカ)マイケル・ジャクソン
洋楽人気動画2006.05.14ホテル・カリフォルニアイーグルス
ロック2005.07.06