TED日本語
TED Talks(英語 日本語字幕付き動画)
TED日本語 - ケン・ゴールドバーグ: ロボットから人間への4つの教訓
TED Talks
ロボットから人間への4つの教訓
4 lessons from robots about being human
ケン・ゴールドバーグ
Ken Goldberg
内容
ロボットが我々の日常生活にとけ込んでくるに従い、我々は人間とは何かを自問しなければならなくなってきています。TEDxバークレイでケン・ゴールドバーグは、ロボットと働いて得た、人間に対する4つの教訓を語っています。(TEDxバークレイで収録)


字幕
SCRIPT
Script

I know this is going to sound strange, but I think robots can inspire us to be better humans. See, I grew up in Bethlehem, Pennsylvania, the home of Bethlehem Steel. My father was an engineer, and when I was growing up, he would teach me how things worked. We would build projects together, like model rockets and slot cars. Here's the go-kart that we built together. That's me behind the wheel, with my sister and my best friend at the time, and one day, he came home, when I was about 10 years old, and at the dinner table, he announced that for our next project, we were going to build a robot.
A robot. Now, I was thrilled about this, because at school, there was a bully named Kevin, and he was picking on me because I was the only Jewish kid in class. So I couldn't wait to get started to work on this so I could introduce Kevin to my robot. (Laughter) (Robot noises)
But that wasn't the kind of robot my dad had in mind. See, he owned a chromium plating company, and they had to move heavy steel parts between tanks of chemicals, and so he needed an industrial robot like this that could basically do the heavy lifting.
But my dad didn't get the kind of robot he wanted, either. He and I worked on it for several years, but it was the 1970s, and the technology that was available to amateurs just wasn't there yet. So Dad continued to do this kind of work by hand, and a few years later, he was diagnosed with cancer.
You see, what the robot we were trying to build was telling him was not about doing the heavy lifting. It was a warning about his exposure to the toxic chemicals. He didn't recognize that at the time, and he contracted leukemia, and he died at the age of 45. I was devastated by this, and I never forgot the robot that he and I tried to build. When I was in college, I decided to study engineering, like him. And I went to Carnegie Mellon, and I earned my PhD in robotics. I've been studying robots ever since.
So what I'd like to tell you about are four robot projects and how they've inspired me to be a better human. By 1993, I was a young professor at USC, and I was just building up my own robotics lab, and this was the year that the World Wide Web came out. And I remember my students were the ones who told me about it, and we would -- we were just amazed. We started playing with this, and that afternoon, we realized that we could use this new, universal interface to allow anyone in the world to operate the robot in our lab.
So, rather than have it fight or do industrial work, we decided to build a planter, put the robot into the center of it, and we called it the Telegarden. And we had put a camera in the gripper of the hand of the robot, and we wrote some special scripts and software so that anyone in the world could come in and by clicking on the screen they could move the robot around and visit the garden. But we also allowed, set up some other software that lets you participate and help us water the garden remotely, and if you water it a few times, we'd give you your own seed to plant.
Now, this was a project, an engineering project, and we published some papers on the design, the system design of it, but we also thought of it as an art installation. It was invited, after the first year, by the Ars Electronica Museum in Austria to have it installed in their lobby, and I'm happy to say it remained online there,24 hours a day, for almost nine years. That robot was operated by more people than any other robot in history.
Now,one day, I got a call out of the blue from a student, who asked a very simple but profound question. He said, "Is the robot real?" Now, everyone else had assumed it was, and we knew it was because we were working with it. But I knew what he meant, because it would be possible to take a bunch of pictures of flowers in a garden and then, basically, index them in a computer system such that it would appear that there was a real robot when there wasn't. And the more I thought about it, I couldn't think of a good answer for how he could tell the difference.
This was right about the time that I was offered a position here at Berkeley, and when I got here, I looked up Hubert Dreyfus, who's a world-renowned professor of philosophy, and I talked with him about this, and he said, "This is one of the oldest and most central problems in philosophy. It goes back to the Skeptics, and up through Descartes. It's the issue of epistemology, the study of how do we know that something is true."
So he and I started working together, and we coined a new term: telepistemology, the study of knowledge at a distance. We invited leading artists, engineers, and philosophers to write essays about this, and the results, the results are collected in this book from MIT Press. So thanks to this student who questioned what everyone else had assumed to be true, this project taught me an important lesson about life, which is to always question assumptions.
Now, the second project I'll tell you about grew out of the Telegarden. As it was operating, my students and I were very interested in how people were interacting with each other and what they were doing with the garden. So we started thinking, what if the robot could leave the garden and go out into some other interesting environment? Like, for example, what if it could go to a dinner party at the White House? (Laughter) So, because we were interested more in the system design and the user interface than in the hardware, we decided that, rather than have a robot replace the human to go to the party, we'd have a human replace the robot. We called it the Tele-Actor.
We got a human, someone who's very outgoing and gregarious, and she was outfitted with a helmet with various equipment, cameras and microphones, and then a backpack with wireless Internet connection, and the idea was that she could go into a remote and interesting environment, and then over the Internet, people could experience what she was experiencing, so they could see what she was seeing, but then, more importantly, they could participate by interacting with each other and coming up with ideas about what she should do next and where she should go, and then conveying those to the Tele-Actor. So we got a chance to take the Tele-Actor to the Webby Awards in San Francisco, and that year, Sam Donaldson was the host. Just before the curtain went up, I had about 30 seconds to explain to Mr. Donaldson what we were gonna do, and I said, "The Tele-Actor is going to be joining you on stage, and this is a new experimental project, and people are watching her on their screens, and she's got -- there's cameras involved and there's microphones and she's got an earbud in her ear, and people over the network are giving her advice about what to do next." And he said, "Wait a second, that's what I do." (Laughter)
So he loved the concept, and when the Tele-Actor walked onstage, she walked right up to him, and she gave him a big kiss right on the lips. (Laughter) We were totally surprised. We had no idea that would happen. And he was great. He just gave her a big hug in return, and it worked out great. But that night, as we were packing up, I asked the Tele-Actor, how did the Tele-Directors decide that they would give a kiss to Sam Donaldson? And she said they hadn't. She said, when she was just about to walk on stage, the Tele-Directors were still trying to agree on what to do, and so she just walked on stage and did what felt most natural. (Laughter) So, the success of the Tele-Actor that night was due to the fact that she was a wonderful actor. She knew when to trust her instincts, and so that project taught me another lesson about life, which is that, when in doubt, improvise. (Laughter)
Now, the third project grew out of my experience when my father was in the hospital. He was undergoing a treatment, chemotherapy treatments, and there's a related treatment called brachytherapy, where tiny, radioactive seeds are placed into the body to treat cancerous tumors. And the way it's done, as you can see here, is that surgeons insert needles into the body to deliver the seeds, and all this, all these needles are inserted in parallel, so it's very common that some of the needles penetrate sensitive organs, and as a result, the needles damage these organs, cause damage which leads to trauma and side effects. So my students and I wondered, what if we could modify the system so that the needles could come in at different angles?
So we simulated this, and we developed some optimization algorithms and we simulated this, and we were able to show that we are able to avoid the delicate organs and yet still achieve the coverage of the tumors with the radiation.
So now, we're working with doctors at UCSF and engineers at Johns Hopkins and we're building a robot that has a number of, it's a specialized design with different joints that can allow the needles to come in at an infinite variety of angles, and as you can see here, they can avoid delicate organs and still reach the targets they're aiming for. So, by questioning this assumption that all the needles have to be parallel, this project also taught me an important lesson: When in doubt -- When your path is blocked, pivot.
And the last project also has to do with medical robotics. And this is something that's grown out of a system called the da Vinci surgical robot, and this is a commercially available device. It's being used in over 2,000 hospitals around the world, and the idea is it allows the surgeon to operate comfortably in his own coordinate frame, but many of the subtasks in surgery are very routine and tedious, like suturing, and currently, all of these are performed under the specific and immediate control of the surgeon, so the surgeon becomes fatigued over time. And we've been wondering, what if we could program the robot to perform some of these subtasks, and thereby free the surgeons to focus on the more complicated parts of the surgery, and also cut down on the time that the surgery would take if we could get the robot to do them a little bit faster?
Now, it's hard to program a robot to do delicate things like this, but it turns out my colleague, Pieter Abbeel, who's here at Berkeley, has develeloped a new set of techniques for teaching robots from example. So he's gotten robots to fly helicopters, do incredibly interesting, beautiful acrobatics, by watching human experts fly them. So we got one of these robots. We started working with Pieter and his students, and we asked a surgeon to perform a task, and what we do is we, with the robot, so what we're doing is asking the robot, the surgeon to perform the task, and we record the motions of the robot.
So here's an example. I'll use a figure eight, tracing out a figure eight as an example. So here's what it looks like when the robot, this is what the robot's path looks like, those three examples. Now, those are much better than what a novice like I could do, but they're still jerky and imprecise.
So we record all these examples, the data, and then we go through a sequence of steps. First, we used a technique called dynamic time warping from speech recognition, and this allows us to temporally align all of the examples, and then we apply Kalman filtering, a technique from control theory, that allows us to statistically analyze all the noise and extract the desired trajectory that underlies them. Now, so what we're doing is that we take those human demonstrations, they're all noisy and imperfect, and we extract from them an inferred task trajectory and control sequence for the robot. We then execute that on the robot, we observe what happens, then we adjust the controls using a sequence of techniques called iterative learning. Then what we do is, we increase the velocity a little bit. We observe the results, adjust the controls again, and observe what happens. And we go through this several rounds. And here's the result. That's the inferred task trajectory, and here's the robot moving at the speed of the human. Here's four times the speed of the human. Here's seven times. And here's the robot operating at 10 times the speed of the human. So we're able to get a robot to perform a delicate task, like a surgical subtask, at 10 times the speed of a human. So this project also, because of its involved practicing and learning, doing something over and over again, this project also has a lesson, which is, if you want to do something well, there's no substitute for practice, practice, practice.
So these are four of the lessons that I've learned from robots over the years, and robotics, the field of robotics has gotten much better over time. Nowadays, high school students can build robots like the industrial robot my dad and I tried to build. And now, I have a daughter, named Odessa. She's eight years old, and she likes robots, too. Maybe it runs in the family. (Laughter) I wish she could meet my dad. And now I get to teach her how things work, and we get to build projects together, and I wonder what kind of lessons that she'll learn from them.
Robots are the most human of our machines. They can't solve all of the world's problems, but I think they have something important to teach us. I invite all of you to think about the innovations that you're interested in, the machines that you wish for, and think about what they might be telling you, because I have a hunch that many of our technological innovations, the devices we dream about, can inspire us to be better humans.
Thank you. (Applause)
不思議に聞こえると思いますが ロボットは我々にひらめきを与えてくれます よりよい人間となるために 私はペンシルバニア州のベツレヘムで育ちました ベツレヘム・スチールの本拠地です 父はエンジニアでした 子供の頃 父は私に いろいろなものがどのような仕掛けで動くか教えてくれました いっしょにいろいろなプロジェクトに取り組みました ロケットの模型とかスロットカーとか これは一緒に作ったゴーカートです ハンドルを握っているのが私です 姉と当時の親友も一緒です 10歳くらいのときでしたある日 父は家に帰ってきて 夕食を食べながらこう言いました 次のプロジェクトはロボットだと
ロボット わくわくしました なぜなら学校で ケビンといういじめっ子がいて 私をいじめていたからです そのクラスでたった一人のユダヤ人だということで このプロジェクトを始めるのを待ち切れませんでした ケビンに私のロボットを紹介するのを(笑) (ロボットの音)
父が考えていたロボットは違いました 父はクロムメッキの会社を経営していました 彼らは重い鋼鉄の部品を 薬品のタンクからタンクへ移動させなければなりませんでした このためこのような工業ロボットが必要でした 重いものを持ち上げることのできる
しかし父も欲しかったロボットを手に入れる事はできませんでした 何年か我々はロボット作りに取り組みました それは70年代のことでした アマチュアの手に入る技術は まだありませんでした 父はこのような仕事を手作業で続けました そして何年か後に 彼は癌と診断されました
我々が作ろうとしていたロボットは 荷物の持ち上げではなく、 薬品に対する警告を発していたのです 彼はそれに気づかず 白血病になり 45才で亡くなりました 私は衝撃を受け 作っていたロボットは忘れられないものになりました 大学では彼と同じエンジニアリングを勉強することにしました カーネギーメロン大学の博士課程ではロボット工学を学びました それからずっとロボットの研究をしています
ご紹介するのはロボットに関する4つのプロジェクトと そのプロジェクトがより良い人間になるために 私にどのようなひらめきを与えてくれたかということです 1993年、私はUSCの若い教授で 自分のロボット研究室を立ち上げていました ワールド・ワイド・ウェブが生まれた年です 学生達がワールド・ワイド・ウェブのことを 教えてくれたのを覚えています 我々は、本当に感心しました ワールド・ワイド・ウェブで遊び始めた午後 この新しい汎用的なインターフェースが 世界中のすべての人が 我々の研究室のロボットを操作するために使えると気づきました
そこで戦ったり、工場で働くロボットではなく 植物を育てるロボットを作ることにしました ロボットを中央において これをテレ・ガーデンと名づけました そしてロボットの手の部分にカメラを付けました いくつかのスクリプトと ソフトを書き、世界中の人が来て スクリーンをクリックすることで ロボットを移動させ 庭を訪れられるようにしました 別のソフトウェアも用意しました 庭の水やりに参加できるソフトで 水を何回かやると 植えることができる自分の種をもらえるというものです
これは工学的なプロジェクトで システムの設計に関していくつかの論文を発表しましたが 同時に我々はこのプロジェクトを 美術作品と考えていました 1年間の実験のあと この庭はオーストリアのアルスエレクトロニカ美術館に招かれ ロビーに展示されました オンラインの状態で 24時間、ほぼ9年間動き続けたことをうれしく思います このロボットは、歴史上のいかなるロボットよりも 多くの人によって操作されました
ある日 ある学生から思いがけない 電話がありました 彼は単純だが本質的な質問をしました 「これは本物ですか?」 他の人々はみなこれを本物だと思っていました これを作った我々は本物だと知っていました しかし彼の意味するところはわかりました 庭と花の大量の写真を撮って それを基本的には索引付して コンピュータであたかもそれが 本物のロボットのように見せることは難しくありません 考えれば考える程 区別する方法を彼にうまく説明できなかったのです
この時期はちょうどバークレー大学に 移った頃のことです バークレーに着くと 世界的に有名な哲学者のヒューバート・ドレイファスを訪ねました そして彼とこの問題を議論しました これは哲学上の最も古くからある基本的な問題の1つだ 古代ギリシャの懐疑派から デカルトまで それは認識論の問題だ あることがなぜ真かどうやって知るかという問題だ
そこで我々は一緒に研究を始めました 新しい「遠隔認識論」という用語を定義しました 離れたところに関する知識の研究です 著名な芸術家やエンジニアや哲学者に この研究の評論を書いてもらいました その結果が MITプレスからのこの本です だれもが当然と思っていた この質問をしてくれた学生に感謝しています このプロジェクトは私に人生の重要なレッスンを与えてくれました 正しいと思い込んでいることを常に疑えと
2つめのプロジェクトは テレ・ガーデンから派生したものです 学生達と私はテレ・ガーデンが動いているとき 人々がお互いどのように連携するのかに興味がありました そして庭で何をしているかに そこで考え始めましたもしロボットが庭から離れて 他の面白そうな場所に いくことが出来たとしたら 例えば、ホワイトハウスでの ディナー・パーティとか(笑) 我々は装置そのものよりもシステムの設計方法や ユーザインターフェースに興味があったので ロボットをパーティに行かせる代わりに 人間をロボットの代わりとして パーティーに行かせることにしました これをテレ・アクターと名付けました
積極的で社交的な 人を選んで カメラやマイクのようないろいろな装置の付いた ヘルメットを着けてもらいました そして無線でインターネットにつながるバックパックを背負ってもらいました 彼女に離れた場所にある面白そうな所に行ってもらい インターネットを使って 彼女が経験していることを人々が経験できるようにするのが狙いでした 彼女が見ているものを見る事が出来 さらに重要なことはお互いにコミュニケーションを取りながら 次に彼女が何をすべきかとか どこに行くべきかとかを 決める事が出来るということです そして決めたことをテレ・アクターに伝える 我々はテレ・アクターを サンフランシスコで開かれたウェビー・アワードに参加させる機会を得ました その年のホストはサム・ドナルドソンでした イベントが始まる直前に 30秒間ドナルドソンに我々が何をするか説明する時間がありました 私はテレ・アクターが あなたとステージに立ちますと言いました これは新しい実験的なプロジェクトで 人々が画面を通じて彼女を見ていて 彼女はカメラや マイク、イヤホンを付けていて ネットワークを介して人々が彼女にするアドバイスや 次に何をするべきかを指示していると説明しました すると彼は、ちょっと待ってくれ それは私のしていることだと言いました(笑)
彼はそのコンセプトが気に入りました テレ・アクターはステージに上がると まっすぐ彼に向かって歩いていきキスをしました 唇に(笑) 我々は本当に驚きました そんなことが起こるとは思ってもいませんでした 彼は偉大でしたお返しに彼女を抱きしめてくれました すべてがうまくいきました その晩、片付けをしているとき テレ・アクターにどうようにして彼らが サム・ドナルドソンにキスをするように決めたのかと聞きました 決めていないと彼女は言いました 彼女がステージを歩いていたとき 彼らは何をすべきかまだ議論していました 彼女がただステージを歩いていって 最も自然に思えたことをしたのです(笑) その晩のテレ・アクターの成功の秘訣は 彼女が素晴らしい俳優だったということです 彼女はいつ直感に従うべきかを知っていました このプロジェクトが私にもう1つの教訓を教えてくれました 迷いが生じたらその場で判断すること(笑)
3つ目のプロジェクトは 父が病院にいたときの経験がもとになっています 父は化学療法を受けていたのですが 他に 近接放射療法という治療法がありました 近接放射療法は小さな放射性の種を 体に埋め込み癌腫瘍を治療するものです これはこのように行われます 外科医が針で体のなかに 種を埋め込みます このように多くの針が平行に埋め込まれます このため針が繊細な器官を貫通してしまい その結果 針が器官を傷つけ 外傷や副作用を引き起こすことがあります そこで学生達と考えました このシステムを針が異なる角度で 埋め込まれるように改良できたらどうだろうと
シュミレーションをおこない いくつかの最適化のためのアルゴリズムを開発し さらにシミュレーションを繰り返すことで 繊細な組織の破壊を避けながら癌腫瘍に対して十分な放射線を 当てることが出来ることがわかりました
いまUSCFの医師達と ジョンズ・ホプキンスのエンジニアグループと協力しながら 我々は多くの 特別にデザインされた接合部をもち 任意の角度で針を挿入することが出来るロボットを開発しています ご覧のように針は繊細な器官を避けながら ターゲットに到達する事が出来ます 針がなぜ平行に挿入される必要があるのか と問うことでこのプロジェクトは 重要な教訓を教えてくれました 壁にぶつかった場合には方向転換をせよ
そして最後のプロジェクトも医療ロボットに関係しています これはダビンチ手術ロボットと言われた システムがヒントになっています これは実際に販売されている装置です 世界中の2000の病院で使用されています アイディアは外科医が いつものように作業をしながら手術に専念できるようにすることです 手術には縫合作業のように 決まりきった退屈な作業がいろいろあります 今はこのような作業は 外科医の直接のコントロールのもとで行われており 時間が経つに従って外科医の疲労が溜まります 我々はこう考えました もしロボットを このような作業を代行するようにプログラムすることができたら そして手術のなかで もっと重要な部分の治療に外科医を専念させることができたら そして手術に要する時間も ロボットが作業を行なうことで短縮できるとしたら
ロボットにこのような細かな作業を行わせることは困難なことですが バークレイの同僚のピーテル・アビールが 操作の模範を人間が示すことでロボットを教育する 一連の新しい技術を開発していました 彼はロボットにヘリコプターを操縦させて 非常に興味深い素晴らしい曲芸飛行を 人間の操作を観察することでさせることに成功していました このようなロボットに手伝ってもらうことにしました ピーテルと彼のところの学生と一緒に研究を始めました 我々は外科医に特定の作業を行うように依頼し ロボットに この外科医がやっている 作業をするように指示しました そしてロボットの動作を記録しました
例を示しましょう 8の字をなぞる作業の例です これはロボットが この作業をおこなった場合の 3つの例です これは私のような初心者が同じ作業をした場合と比べれば 上手なものですがまだぎくしゃくしていて不正確です
このような例を記録し 一連の処理をおこないます まず動的時間伸縮法と呼ばれる音声認識で利用される手法を 適用します これにより全ての作業例を平準化することができます そしてカルマンフィルターを適用します 制御理論から出てきた手法で 統計的に全ての雑音を解析し その背後にある必要な軌道を抽出します 我々が行っていることは 人間による操作から雑音や不完全さを取り除き 予測される軌跡と制御手順を ロボットのために抽出することです そしてその操作をロボットで実行し 結果を確認します そしてロボットの制御を反復学習とよばれる 手法を用いて調整します そしてロボットが操作する速度を少し速めます 結果を確認し再度制御方法を調整します そしてまた結果を確認します このような一連の処理を何度か繰り返します これがその結果です これが期待される軌跡で これがロボットが人間を同じ操作速度でおこなった作業の結果です これは4倍の速さで作業を行なった場合の結果です これは7倍の速さです そしてこれは人間の10倍の速さで 作業をした場合の結果です 我々はロボットに手術のような 繊細な作業を10倍の速さで 行なわせることが出来るようになりました このプロジェクトでも 練習や学習同じ事を何度も繰り返すということから ある教訓を学びました もし何かを上手にやりたければ 練習以外に道はない
以上の4つが私が何年も掛けて ロボットから学んだ教訓です ロボティックスの分野は時間を経て 非常に進歩しました 今日では高校生がロボットを組み立てることが出来ます ちょうど私と父が作ろうとしたような いま私にはオデッサという 娘がいます 彼女が8歳で ロボットがやはり好きです もしかしたら血筋なのかも知れません(笑) 娘が父に会えたらと思います。 今は私が彼女にものがどのように動くかを教えています 一緒にプロジェクトをするようになり 彼女がどのような教訓をそこから学ぶのか興味があります
ロボットは機械のなかで 最も人間的なものです いろいろな世の中の問題を解決することが出来ます しかしそれ以上に何か重要なことを我々に教えてくれるような気がします あなたが興味を持っている 技術革新や あればいいと思う機械が あなたに何を語りかけているのか考えてみてください なぜなら 技術革新や あればいいと思う装置が 我々がより良い人間になるためのひらめきを与えてくれる予感がするからです
ありがとうございます(拍手)
品詞分類
- 主語
- 動詞
- 助動詞
- 準動詞
- 関係詞等
TED 日本語
TED Talks
関連動画

しなやかで柔軟性を持つロボットの驚くべき可能性 - TED Talkジアーダ・ゲルボーニ
2018.07.05ロボットの気持ちを考える ― 人間とロボットの共存社会を目指してレイラ・タカヤマ
2018.02.16魚の群れから学習する知能機械ラディカ・ナグパール
2017.10.06ロボットは大学入試に合格できるか?新井紀子
おすすめ 12017.09.13走って飛び跳ねて、ドアも開けられるロボット犬「スポット」マーク・レイバート
2017.08.14汚染物資を「食べる」ロボットジョナサン・ロシター
2017.03.15魅惑的な未来の飛行ロボットを披露ラファエロ・ダンドリーア
2016.03.11イモリの様に走り、泳ぐことのできるロボットアウケ・エイスペールト
2016.02.18空飛ぶロボットの未来ヴィージェイ・クーマー
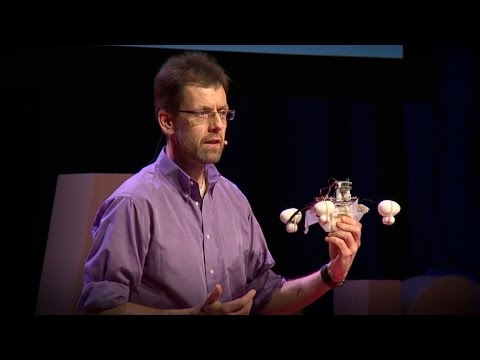
2015.11.04米粒のサイズのロボットを作る理由サラ・バーグブライター
2015.01.21空飛ぶカメラ、ただしリード付きセルゲイ・ルパシン
2014.10.28自然界で最も不快な生き物にヒントを得たロボットロバート・フル
2014.06.06「心」を宿したロボットガイ・ホフマン
2014.01.17私の水中探査ロボットデイビッド・ラング
2013.12.05なぜ、私たちはロボットに頼ることになるのかロドニー・ブルックス
2013.06.28クアッドコプターの驚くべき運動能力ラファエロ・ダンドリーア
2013.06.11














洋楽 おすすめ
RECOMMENDS
洋楽歌詞
ダイナマイトビーティーエス
洋楽最新ヒット2020.08.20ディス・イズ・ミーグレイテスト・ショーマン・キャスト
洋楽人気動画2018.01.11グッド・ライフGイージー、ケラーニ
洋楽人気動画2017.01.27ホワット・ドゥ・ユー・ミーン?ジャスティン・ビーバー
洋楽人気動画2015.08.28ファイト・ソングレイチェル・プラッテン
洋楽人気動画2015.05.19ラヴ・ミー・ライク・ユー・ドゥエリー・ゴールディング
洋楽人気動画2015.01.22アップタウン・ファンクブルーノ・マーズ、マーク・ロンソン
洋楽人気動画2014.11.20ブレイク・フリーアリアナ・グランデ
洋楽人気動画2014.08.12ハッピーファレル・ウィリアムス
ポップス2014.01.08カウンティング・スターズワンリパブリック
ロック2013.05.31ア・サウザンド・イヤーズクリスティーナ・ペリー
洋楽人気動画2011.10.26ユー・レイズ・ミー・アップケルティック・ウーマン
洋楽人気動画2008.05.30ルーズ・ユアセルフエミネム
洋楽人気動画2008.02.21ドント・ノー・ホワイノラ・ジョーンズ
洋楽人気動画2008.02.15オンリー・タイムエンヤ
洋楽人気動画2007.10.03ミス・ア・シングエアロスミス
ロック2007.08.18タイム・トゥ・セイ・グッバイサラ・ブライトマン
洋楽人気動画2007.06.08シェイプ・オブ・マイ・ハートスティング
洋楽人気動画2007.03.18ウィ・アー・ザ・ワールド(U.S.A. フォー・アフリカ)マイケル・ジャクソン
洋楽人気動画2006.05.14ホテル・カリフォルニアイーグルス
ロック2005.07.06